UGV Inspection Flowchart
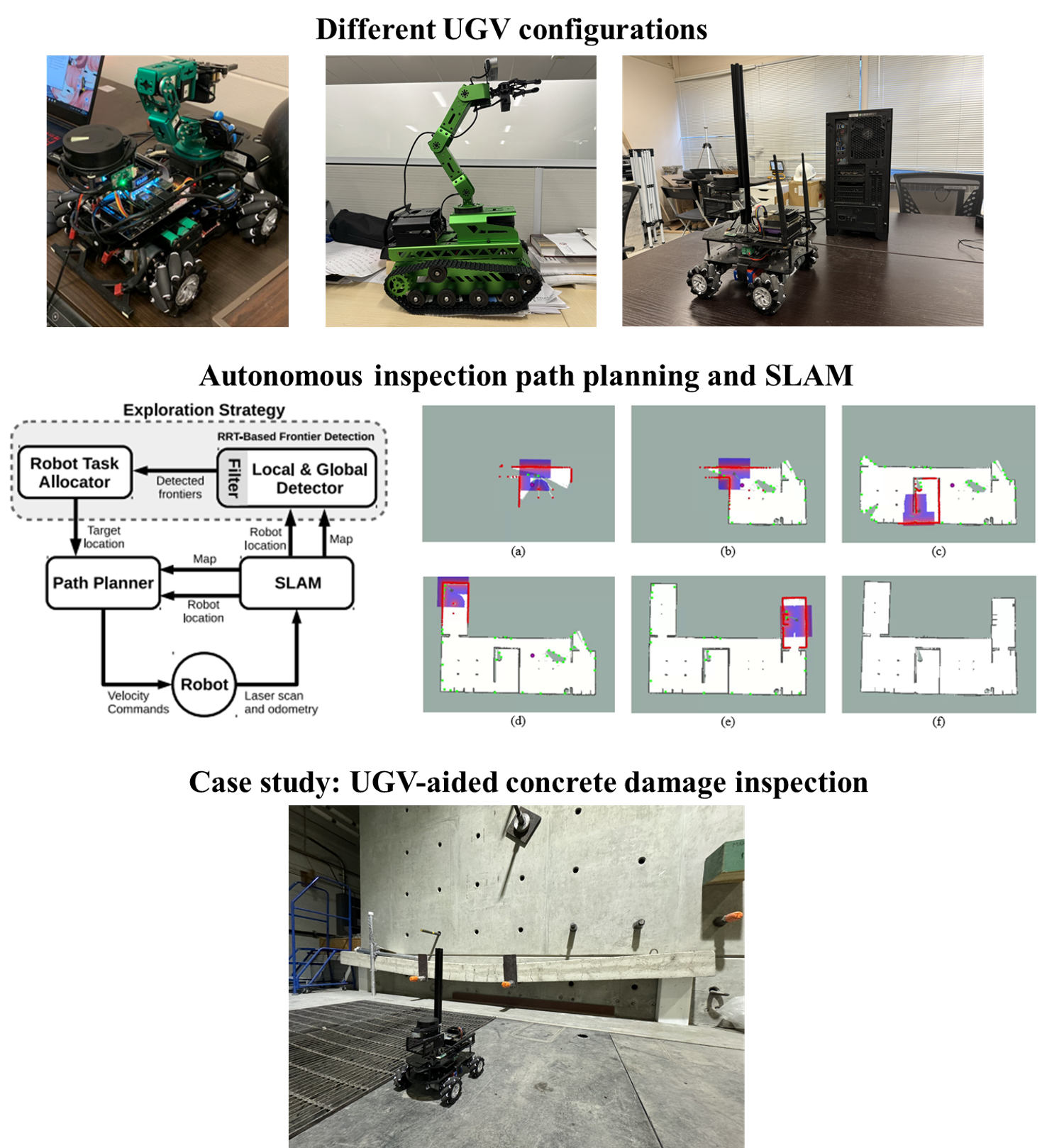
Modern unmanned ground vehicles (UGVs) play important roles in many industries. Compared to UAVs, UGVs have a much higher payload, which can house various types of sensors and manipulators with different base platforms to suit different scenarios, such as legged UGVs for buildings and construction sites, wheeled UGVs for roads and construction sites, and hybrid wheeled-legged UGVs for complex terrains. This research aims to develop and apply an autonomous UGV-aided approach for structural inspection tasks, including autonomous path planning, simultaneous localization and mapping (SLAM), and task-specific algorithms.
UGV Inspection Flowchart
[1]. Xiao, Y., Pan, X., Tavasoli, S., M. Azimi, Y. Bao, Noroozinejad Farsangi E., Yang T.Y. (2023) “Autonomous inspection and construction of civil infrastructure using robots.” Automation in Construction Toward Resilience, edited by Ehsan Noroozinejad Farsangi, Mohammad Noori, Tony T.Y. Yang, Paulo B. Lourenço, Paolo Gardoni Izuru Takewaki, Eleni Chatzi, Shaofan Li.