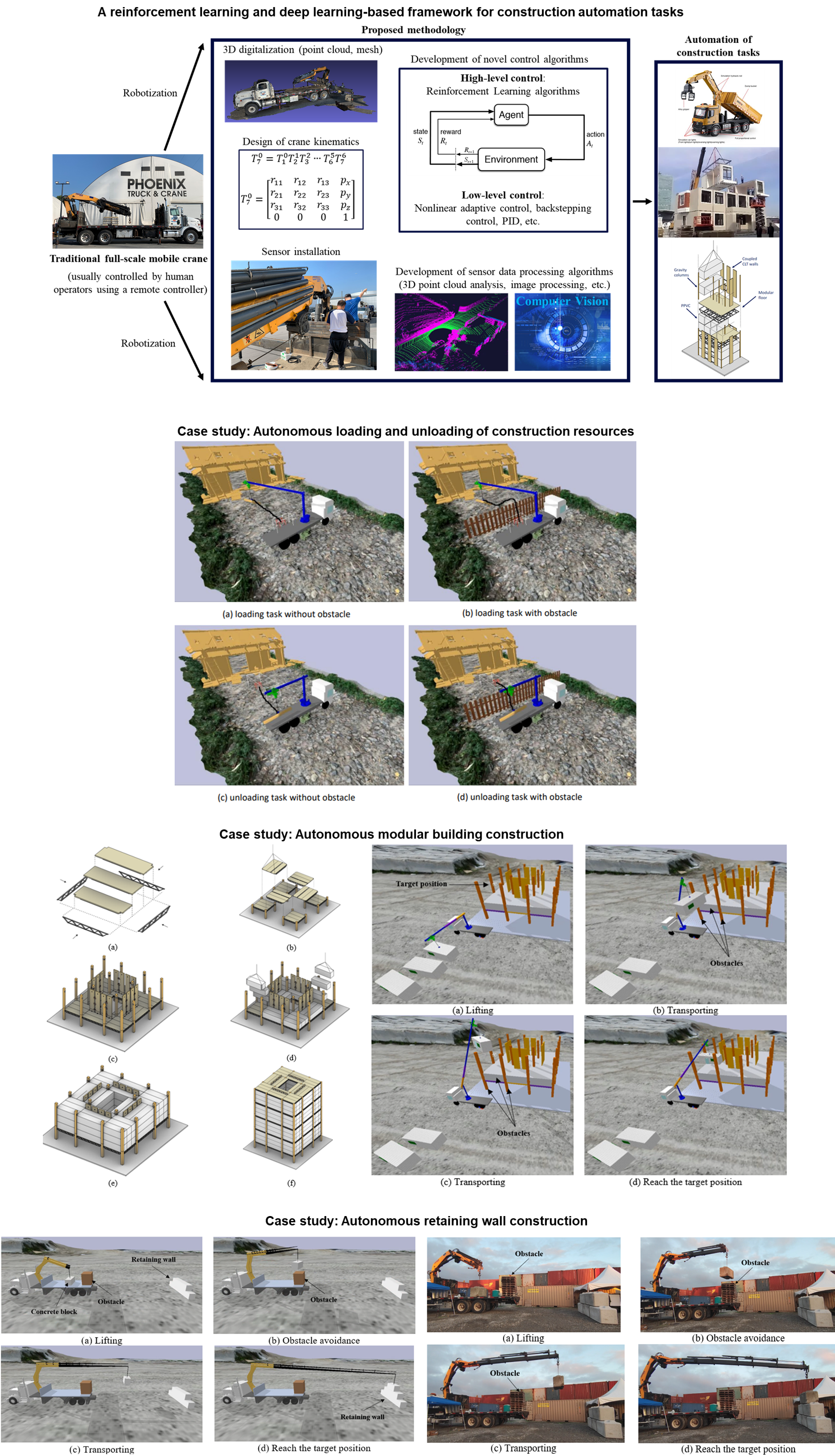
Methodology
The construction industry is an important contributor to the world economy. The built environment accounts for 39% of annual carbon emissions worldwide. However, the overall productivity growth of the construction industry has been slower than other sectors, such as the manufacturing industry, for decades. In addition to low productivity, the traditional construction industry also poses unique challenges, such as long construction times, high initial investment, lack of experienced contractors and skilled workers, and, most importantly, difficulties in quality control during construction. To address these limitations, more advanced construction technologies should be developed to improve the economy and sustainability aspects of the existing workflow. In recent years, researchers have proposed that the involvement of robots can improve safety, productivity, and efficiency in the construction industry. However, existing research is mainly focused on the use of robotic arms, unmanned ground vehicles (UGV), and unmanned aerial vehicles (UAV) for construction tasks. Due to the limited payloads of these robots, their demonstrations are limited to the laboratory environment, while their applications in real-world construction projects remain highly limited. Within this context, this research project aims to robotize full-scale construction machines such as mobile cranes and excavators, which can lift and transport full-scale structural components, and develop and apply autonomous control algorithms to automate different construction tasks.
Methodology
[1]. Xiao, Y., Pan, X., Tavasoli, S., M. Azimi, Y. Bao, Noroozinejad Farsangi E., Yang T.Y. (2023) “Autonomous inspection and construction of civil infrastructure using robots.” Automation in Construction Toward Resilience, edited by Ehsan Noroozinejad Farsangi, Mohammad Noori, Tony T.Y. Yang, Paulo B. Lourenço, Paolo Gardoni Izuru Takewaki, Eleni Chatzi, Shaofan Li.
[2]. Xiao Y., Yang T. Y., Pan, X., Xie, F., Chen, Z. (2023). A reinforcement learning based construction material supply strategy using robotic crane and computer vision for building reconstruction after an earthquake. Canadian Conference - Pacific Conference on Earthquake Engineering (CCEE-PCEE) 2023, Vancouver, British Columbia, Canada.
[3]. Pan, X., Yang, T.Y., Liu, R., Xiao Y., Xie, F. (2024). A computer vision and point cloud-based monitoring approach for automated construction tasks using full-scale robotized mobile cranes. Journal of Intelligent Construction.
[4]. Xiao, Y., Yang, T. Y., Pan, X., Xie, F., & Baghmisheh, A. G. (2025). Autonomous modular construction strategy using robotized crane based on deep learning and reinforcement learning. Journal of Civil Engineering and Management, 31(8), 955-972.
[5]. Xiao, Y., Yang, T. Y., Pan, X., Xie, F., & Liu, R. (2026). Development and Implementation of Machine Learning–Based Hierarchical Approach for Autonomous Retaining Wall Construction Using a Robotized Crane. Journal of Computing in Civil Engineering, 40(5), 04026055.